Explore our innovations in robotics — designed for high-impact competitions and frontier research.

Rover bot created for University Rover Challenge 2026
TARA is an advanced autonomous rover designed for the rigorous challenges of the University Rover Challenge 2026. Equipped with state-of-the-art navigation and manipulation systems, it is built to operate in extreme environments, pushing the limits of robotic exploration.
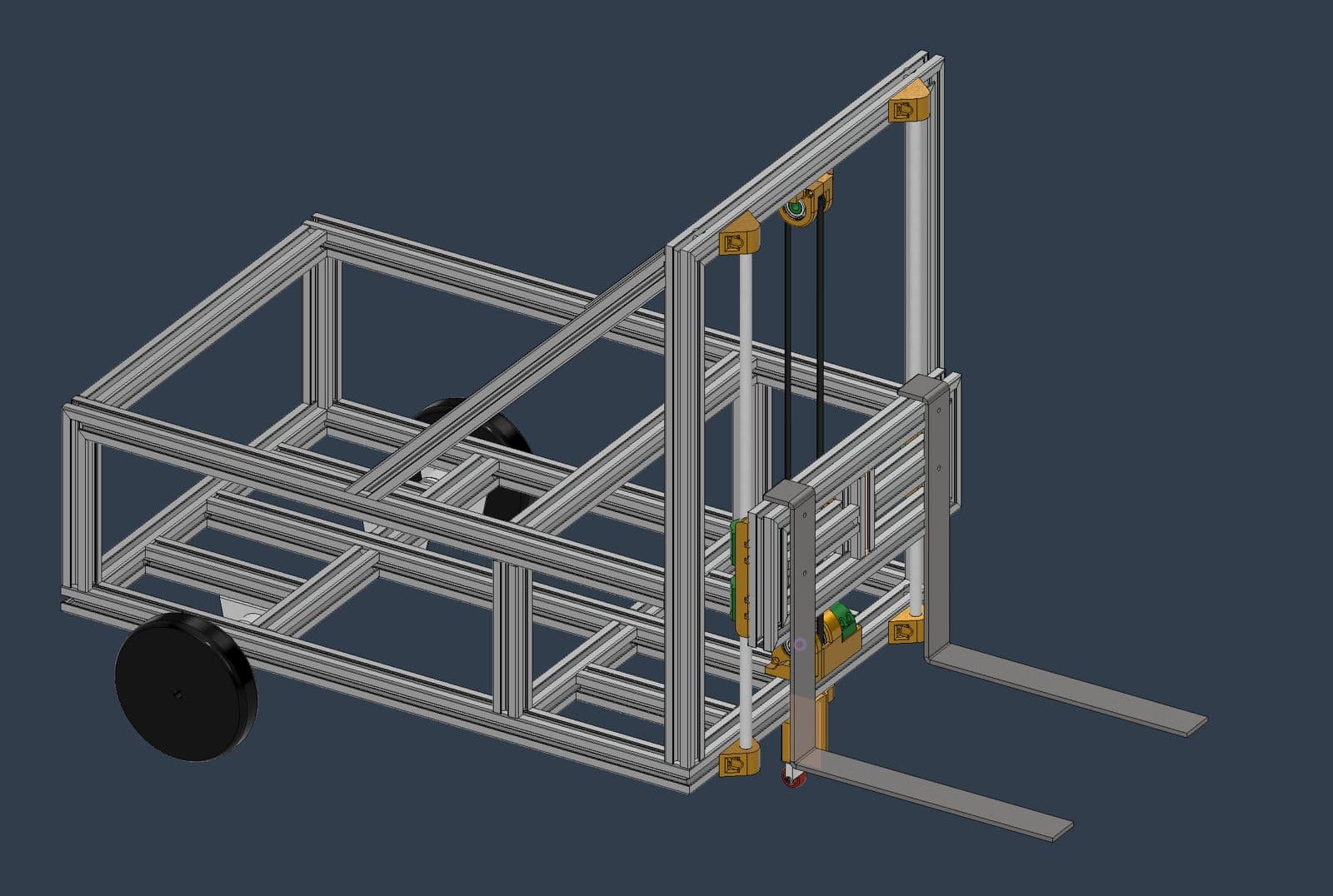
Highspeed Autonomous Logistics Robot
H.A.L. is a cutting-edge autonomous logistics bot designed for high-speed package transportation. Autonomous navigation, manual teleoperation mode and real-time obstacle avoidance ensures efficient and reliable deliveries in dynamic environments.

4-legged bot emulating Dog-like Locomotion
Doggo is a quadrupedal robotic system that mimics canine movement. It serves as a completely indigenously developed bot for RND in advanced Robotics Locomotion and Control Systems.

Autonomous Recon and Elimination System
Autonomous Recon and Elimination System. An autonomous 6 wheeled holonomic drive bot with stabilized mounted turret. Capable of autonomous search, target identification and tracking. Suitable for indoor and outdoor hostile environments. Uses new RRT path planning algorithm for navigation
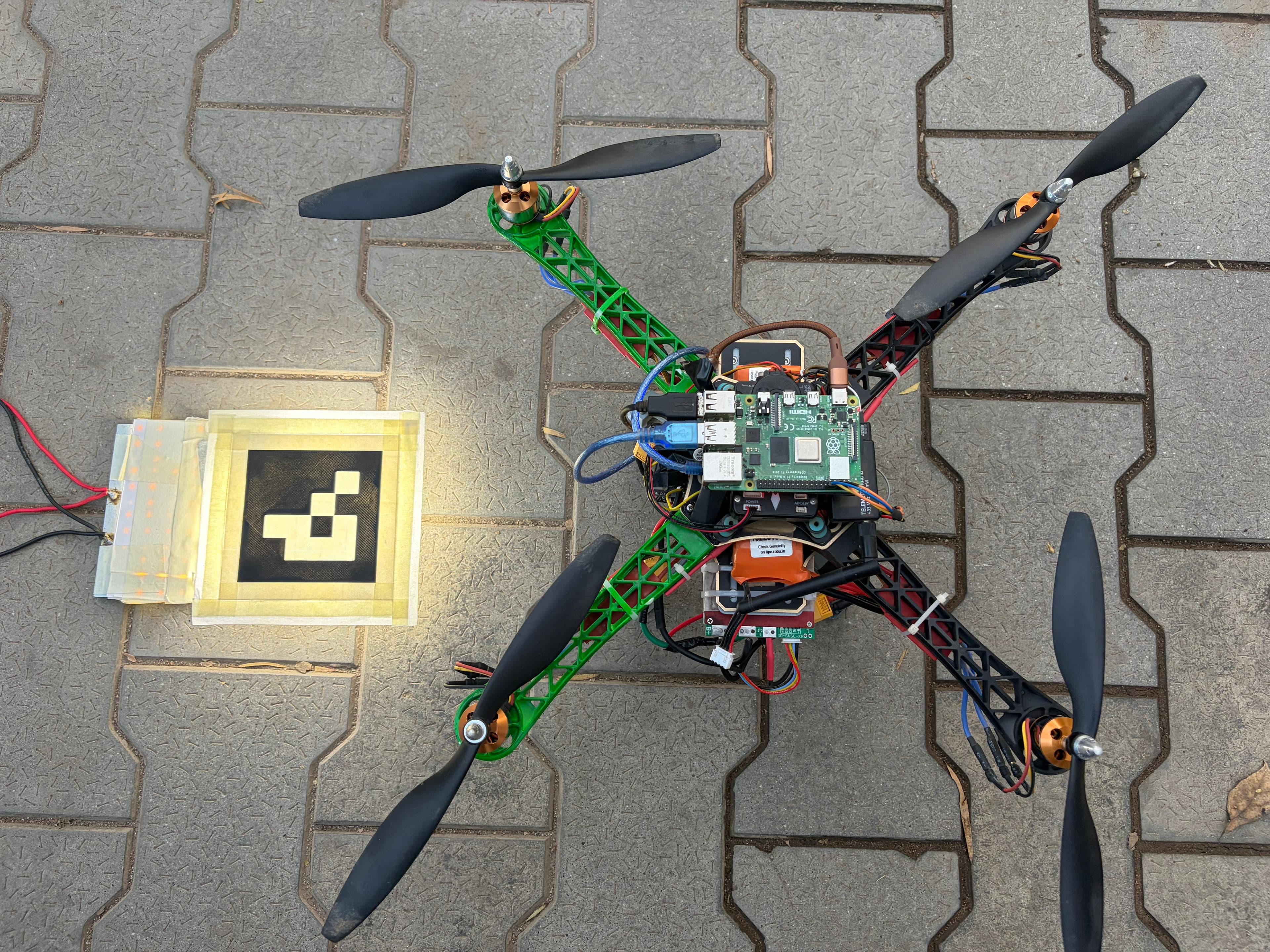
An autonomous aerial robotic system
DART is a drone capable of autonomous navigation in GPS-denied environments, eliminating dependency on navigation satellites. It pairs with a base station for automatic landing, charging, and data transfer — a fully autonomous aerial system requiring no human intervention.

EMG-controlled robotic prosthetic
A biomechanically accurate robotic arm driven by surface EMG signals and neural-inspired control algorithms, enabling intuitive real-time prosthetic control. Serves as a research platform for human-machine interfaces and assistive robotics.
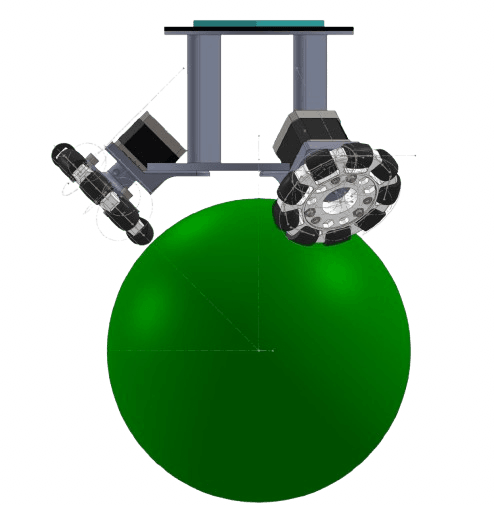
Single-sphere balancing robot
A dynamically balanced robot that locomotes on a single ball using reaction wheels and PID control. Serves as a testbed for studying nonlinear balance control and omnidirectional motion planning.

Neuromorphic engineering and R&D
Our team explores brain-inspired computing through the research and development of neuromorphic circuits. By mimicking biological neural architectures, we focus on building highly efficient, adaptive systems designed to advance sensory processing, minimize energy consumption, and enhance autonomous decision-making across our robotic platforms.
Join us in shaping the future of robotics. Let's build something extraordinary together.
Or email us at teamastra@rvce.edu.in
